About Us




IDMind was founded in 2000 by Paulo Alvito and Carlos Marques in Lisbon, Portugal, and has since focused on the design and development of innovative solutions in robotics, automation, and mechatronics.
From the outset, the company has specialized in developing robots from the ground up - engineering custom mechanical structures, modular electronics, control software, and integrated sensing systems tailored to the specific requirements of each project.
Our multidisciplinary team is central to this mission. By uniting specialists in mechanical engineering, electronics, software development, industrial design, and human–robot interaction, we integrate diverse expertise to create solutions that are technically robust, intuitive to use, and aligned with real-world requirements. This collaborative approach drives innovation and enables us to address complex challenges across a broad spectrum of application domains.
Over the years, IDMind has developed a broad portfolio of robotic platforms, ranging from educational systems to advanced service, inspection, and social robots. Today, under the Living Robotics vision, we continue to advance the frontiers of human–robot coexistence by creating intelligent, reliable, and human-centric solutions for healthcare, logistics, and interactive applications.
At IDMind - Living Robotics, we aim to create robots that can not only share the same space with people but also work and collaborate with them safely and effectively.
Timeline

2000 Edutainment Circular Robot
This was IDMind’s first product: a compact, circular differential-drive robot kit designed for learning and experimentation in robotics. It featured multiple infrared sensors and expansion ports, making it well suited for use in educational environments.
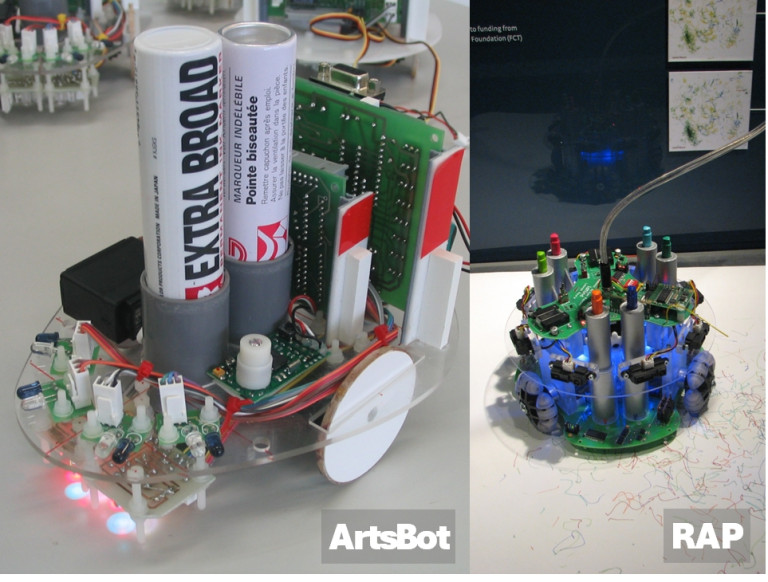
2003 ArtsBot (+ RAP)
ArtSBot is a collection of autonomous robots created for the Portuguese artist Leonel Moura. Using principles of randomness and stigmergy, they generate paintings and drawings. Each robot perceives its environment through a color sensor and interacts with it using two painting markers. Later, In 2006, we developed and installed the RAP robot at the American Museum of Natural History in New York. This version represented a significant upgrade over earlier robots, incorporating omnidirectional kinematics, enhanced color recognition, and three ink markers.

2004 Raposa (+Raposa NG)
Semi-Autonomous Search & Rescue Robot, was designed to operate in environments hostile to human presence otherwise not reachable, like those resulting from an earthquake. This project was supported by Agência de Inovação (ADI) through the POSI program, and it was among the four finalists for the “EURON 2006 Technology Transfer Award”. The partners of this project were IDMind; Instituto Superior Técnico (IST/ISR); Regimento de Sapadores Bombeiros de Lisboa (RSBL); University of South Florida – Perceptual Robotics Laboratory (USF/PRL).

2005 ISocRob
Texto

2009 SIGA
The Santander Interactive Guest Assistant (SIGA) robots were developed through a collaboration between IDMind and the Portuguese companies YDreams and Selftech. A fleet of five indoor autonomous mobile robots was created to guide visitors at the Visitor’s Centre of Ciudad Grupo Santander, near Madrid, Spain. IDMind was responsible for requirements analysis, the development of the robots’ electronic and mechanical systems, and the implementation of low-level software.

2010 MAGABOT
MAGABOT was a low-cost open-source robotics platform designed to give mobility to any portable computer (laptop on wheels concept). This was an entry level robot platform, and it targeted the edutainment market.

2012 Link237
Link237 was developed by IDMind, while integrated in an interactive project of YDreams for the Brazil’s Banco Bradesco. Link237, greeted and provided assistance to visitors in a branch of this Bank, called Bradesco Next, located in São Paulo’s high-end JK Iguatemi Mall. The robots worked autonomously, they self-locate and moved around without colliding with any object or person using a set of sensors. IDMind’s 2WD solution was customized to use as base to re-create Bradesco’s pre-existing advertisement animation character.

2014 FROG
FROG was an outdoor guide robot with a winning personality and behaviours to engage tourists in a fun exploration of outdoor attractions. This was a collaborative project under the FP7-ICT-2011.2.1 Cognitive Systems and Robotics (a), (d) area of activity. And had as partners the University of Amsterdam, IDMind, Universidad Pablo de Olavide, Imperial College of Science Technology and Medicine, and the University of Twente.

2014 MBOT
Multi-Robot Cognitive Systems Operating in Hospitals project focused on social robotics using networked heterogeneous robots and sensors to interact with children, staff, and visitors, engaging in edutainment activities in the pediatric infirmary at the Portuguese Oncology Institute at Lisbon (IPOL), Portugal. MOnarCH was a collaborative project under FP7-ICT-2011.2.1., and the consortium was formed by five academic research institutions, two SMEs and one hospital.

2015 SocialRobot
Social robot project aimed the development of an integrated robotic and ICT-based care & wellness services system to support the elderly to remain active and independent in their preferred environment, through knowledge transfer and creation of strategic synergies between the partners. The project was funded within the FP7, Industry-Academia Partnerships and Pathways (IAPP), and the consortium was formed by IDMind, University of Coimbra, Citard Services, and the University of Cyprus.

2016 FoxIris
Foxiris was developed in the scope of TOTAL’s ARGOS Challenge. IDMind integrated team FoxIris, one of the five finalists chosen by the oil company TOTAL to enter the challenge of building an Autonomous Robot for Gas & Oil Sites (ARGOS). FoxIris was capable of autonomous operation in a harsh industrial environments and its design was compliant with IP67 and ATEX/IECEx standards.

2016 Astro/Mineiro
Astro/Mineiro robot is a cicerone that has been placed in a miner museum, to guide people and give information. It moves around the spaces autonomously and it has human-robot interaction features that make communication easy and natural.

2017 SQUIRREL
13 SQUIRREL was designed to address the issue of clutter for mobile manipulation. The research was driven by a cleaning scenario where a robot navigated in a cluttered environment and collected objects to be stowed away in designated places. The developed system was evaluated over a toy problem scenario: cleaning up a child’s room. The toys were scattered on the floor represented the clutter, and their variable sizes and arrangements exhibited all the rich complexity of the real world needed to validate the project approach. At the same time, using sturdy and lightweight objects and keeping manipulation at floor level alleviated hardware requirements and allowed learning from failures.

2017 Tabaco
Texto

2018 Loop
Loop is a service robot developed by IDMind and a long-lasting co-worker in the Champalimaud Clinical Centre. For the last 6 years this autonomous robot has been helping healthcare professionals in the execution of their daily tasks by performing a repetitive task of transporting medications from the pharmacy inside the hospital facilities.

2018 IPCB
Texto

2018 SIAR
Sewer Inspection Autonomous Robot project resulted on the development of a fully autonomous ground robot able to autonomously navigate and inspect the sewage system with a minimal human intervention, and with the possibility of manually controlling the vehicle or the sensor payload when required. The project was developed in the scope of the ECHORD++ (FP7 funding), the consortium was led by IDMind – that built the mobile platform - and included also two universities.

2019 HARU
Tabletop Social Robot was born from a collaboration between IDMind and the Honda Research Institute Japan Co. Ltd. HARU is a socially intelligent tabletop robot developed by the Honda Research Institute Japan in collaboration with a global network of partners. It is designed to advance the study of long-term human-robot interaction in everyday settings, including schools, hospitals, and homes.

2019 ARCO
Autonomous Robot CO-Worker had the purpose of demonstrating the usefulness of having a robot collaborating with a human operator in the execution of their daily tasks. This project was funded through the HORSE H2020, and the consortium was formed by IDMind, the University of Pablo de Olavide, and the company Robbilac. While IDMind developed the robot, the University of Pablo de Olavide performed validation experiments in an industrial environment, and Robbialac as the end-user partner in ARCO, hosted these experiments.

2020 ELMO
Elmo is a tabletop solution that was developed by IDMind to be an embodiment of a telepresence or interface. It can reach a plethora ofend users – from individuals to professionals – by increasing the dynamics in remote work/collaborations; facilitating healthcare and medicalapplications; improving long-distance education and learning, long-distance family and social connections, accessibility, and inclusion; acting aspersonal assistance, home monitoring, emergency response; or just be an entertainment or companion source.

2021 ROVID (+Adegas)
RObot for VIrus Disinfection (ROVID) project aimed the development of a robotic solution that would serve as a disinfectant tool to be used in shared indoor spaces. This project resulted in a mobile, autonomous solution with an intelligent disinfection system capable of inactivating SARS-CoV-2 virus in indoor spaces, possible through the action of two robots: one equipped with Ultraviolet type C light system and the other with a disinfectant nebulizer system. This project was funded under P2020, FEDER, LISBOA-01-02B7-FEDER-069789.

2021 ONA
ONA was born from a collaboration between IDMind and Volkswagen Innovation. ONA is an outdoor robotic platform designed to address emerging challenges in logistics and urban mobility. Its core concept features a modular locomotion base engineered to support interchangeable upper bodies tailored to specific service applications, such as small-parcel delivery, bulk-volume transport, or electric-vehicle charging.

2022 Youship
Youship - Delivery Robot is a Logistics robot for last-mile delivery and concierge services. It can operate in two modes: follow-me, following a specific person, and in autonomous mode making fully autonomous tasks.

2024 Harmony (+GiDi)
Assistive robots for healthcare project aimed to enable robust, flexible and safe autonomous mobile manipulation technology for use in human-centred environments. The result was a modular, customizable service robot designed to optimize hospital logistics and support healthcare staff. Built on IDMind’s modular mobile platform, it performs essential tasks such as logistics & delivery, small object manipulation, and social interaction. The project was funded under HORIZON 2020, ICT-46-2020 and the consortium was formed by IDMind, ETHZ, TUDelft, UTwente, USZ, KarolinskaUH, UBonn, ABB, CREATE, and UEDIN. Project webpage: https://harmony-eu.org/

2025 Cicerone (Vodafone)
Cicerone (Vodafone) is a social robot that was developed to serve as a host in an office building, greeting clients and guiding them to different rooms or spots, it can also be used as an avatar allowing people to control and communicate through it.
IDMIND's robots around the world

Partners & Clients



































